中文
|
English


科研进展
生态系统遥感研究室在多源激光雷达数据融合方面取得最新研究成果
时间:2024-01-23
精确探测森林的三维结构对于理解生态系统功能和生物多样性至关重要。随着遥感技术,特别是无人机(UAV)和激光雷达(LiDAR)技术的快速发展,高效获取森林的精准三维结构信息成为可能。自上而下的无人机激光扫描(ULS)和自下而上的地面激光扫描(TLS)以互补的视角提供了非破坏性的森林三维结构信息获取方法。然而,由于森林环境的复杂性与单木属性的同质性,ULS与TLS点云重叠点较少且难以提取区分度明显的单木特征,森林场景下无人机激光雷达点云和地基激光雷达数据的无标记快速配准仍然是一个挑战。
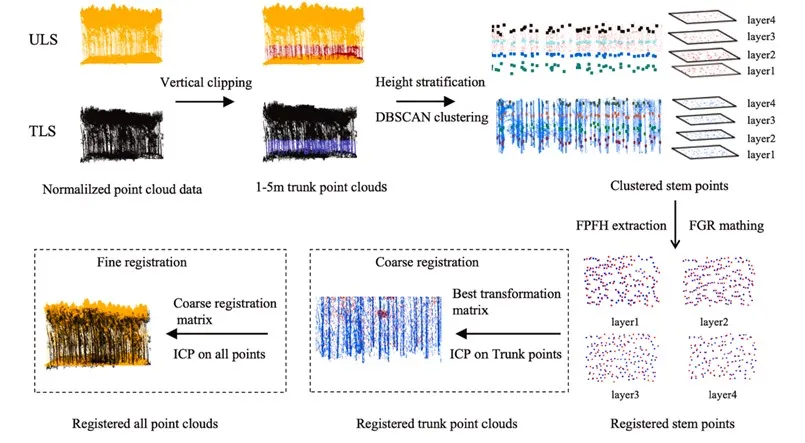
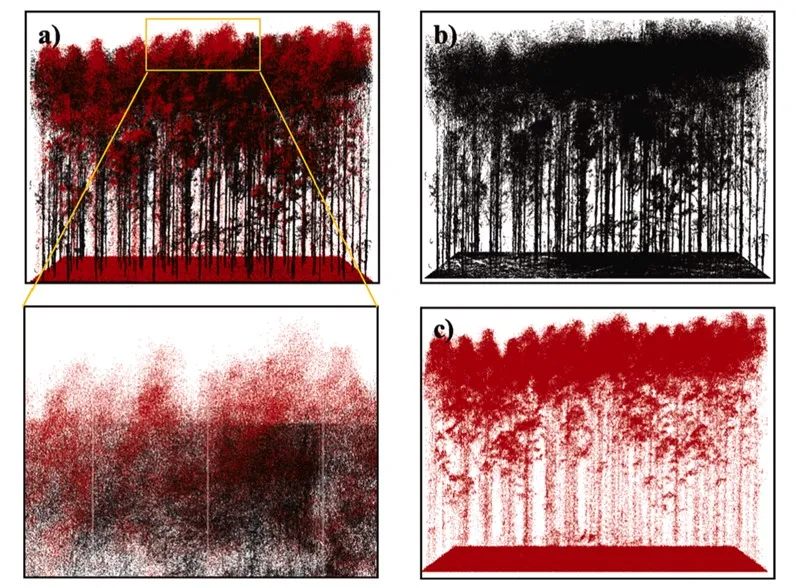
中国科学院空天信息创新研究院生态系统遥感研究室曾源研究员团队提出了一种基于分层聚类的无人机与地基激光雷达数据自动配准流程(图1)。该方法首先利用层次聚类法从高程归一化的ULS和TLS点云数据中生成不同高度的树木分布图,基于树木分布图中的单木空间关系,使用快速全局配准(FGR)算法提取和匹配所有ULS和TLS聚类点的快速点特征直方图(FPFH)描述符;之后,使用点对点匹配策略获得ULS和TLS树干点云每层之间的变换矩阵,并从所有层中选择最佳矩阵,通过迭代最近邻搜索和最小二乘法优化变换矩阵;最后利用最优变换矩阵将TLS点云局部坐标系转换为ULS点云全局坐标系,并通过ICP算法进行精配准(图2)。
研究团队在广西高峰国家森林公园收集了40个不同林分密度的桉树样地无人机与地基激光雷达数据开展研究。与传统手动配准相比,本研究提出的自动配准方法不仅提供了更高的配准精度(点云匹配度: 0.945 > 0.928;RMSE: 0.144 < 0.151),而且在效率上也有明显改进,平均每个30 × 20米样地仅需48.9秒的配准时间,其中粗配准阶段仅占19.4秒。这项研究体现出基于聚类单木特征的无标记自动配准方法在ULS和TLS点云配准方面的高效性,为获取精准林木参数、实现大范围的森林资源调查和生态研究提供了重要的技术支持。
该研究成果以“A clustering-based automatic registration of UAV and terrestrial LiDAR forest point clouds”为题,于2024年1月19日在线发表在中国科学院1区期刊《Computers and Electronics in Agriculture》(IF = 8.3)。中国科学院空天院生态系统遥感研究室硕士研究生陈俊华与赵旦副研究员为论文共同第一作者,曾源研究员为论文通讯作者。本研究获国家重点研发计划项目战略性国际科技创新合作重点专项(2020YFE0200800)、国家重点研发计划青年科学家项目(2022YFF1302100)和国家自然科学基金项目(42071344)等资助。
